Flight Management Navigation -
FMS Vertical Navigation (VNAV)
Vertical Navigation (VNAV)
VNAV provides vertical profile guidance through the climb, cruise, and descent phases of flight.
Speed/Altitude Constraints
VNAV controls the path and speed to comply with waypoint crossing constraints. Waypoint crossing constraints are entered on the LEGS page waypoint line by pushing the applicable key on the right side of the CDU. Barometric altitude constraints must be below the cruise altitude to be valid. Values entered as part of a procedure and manually entered constraints are shown in large font. FMC predicted values do not act as constraints, and are displayed in small font.
Waypoints can have altitude or airspeed/altitude constraints. Speed constraint entries require an altitude constraint at the same waypoint. All speed constraints are considered by the FMC as at or below constraints.
At or above altitude constraints are entered with a suffix letter A (example: 220A). At or below altitude constraints are entered with a suffix letter B (example: 240B). Mandatory altitude constraints are entered without any suffix letter (example: 270).
Altitude constraints with two altitudes may be entered in either order. The lower altitude constraint, followed by a suffix letter A, and the upper altitude constraint, followed by a suffix letter B (example: 220A240B or 240B220A).
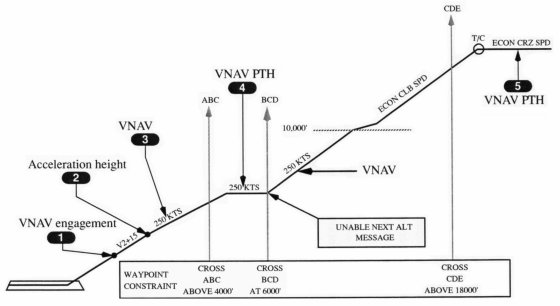
Takeoff and Climb
PEGASUS FMC
|
|
1 |
Takeoff During takeoff the target airspeed is between V2 + 15 and V2 + 25 knots. When VNAV is engaged the FMC airspeed is set to the target airspeed. Climb thrust must be selected before VNAV can be engaged. |
2 |
Acceleration Height |
3 |
VNAV Climb |
4 |
Climb Constraints
If the FMC predicts the airplane will not reach an altitude constraint, the message UNABLE NEXT ALT is displayed on the CDU. Speed intervention can be used by pushing the IAS/MACH selector and manually setting a lower airspeed to provide a steeper climb or climb derates can be deleted. |
5 |
Top Of Climb (T/C) The T/C point is displayed on the map as a green open circle with the label T/C. |
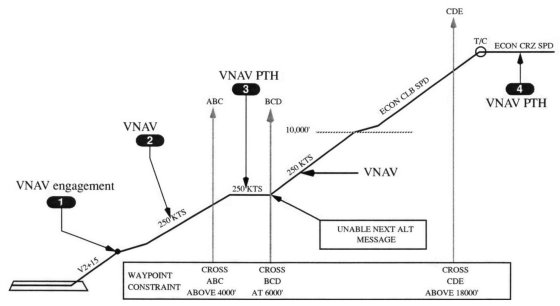
NON PEGASUS FMC
|
|
1 |
Takeoff During takeoff the target airspeed is between V2 + 15 and V2 + 25 knots. When VNAV is engaged the FMC airspeed is set to the target airspeed.
|
2 |
VNAV Climb |
3 |
Climb Constraints
If the FMC predicts the airplane will not reach an altitude constraint, the message UNABLE NEXT ALT is displayed on the CDU. Speed intervention can be used by pushing the IAS/MACH selector and manually setting a lower airspeed to provide a steeper climb or climb derates can be deleted. |
4 |
Top Of Climb (T/C) The T/C point is displayed on the map as a green open circle with the label T/C. |
Cruise
At cruise altitude, the FMC commands economy cruise speed or the pilot entered speed until reaching the top-of-descent (T/D) point. Alternate cruise speed options are:
- Long Range (LRC).
- Engine out (ENG OUT).
- Flight crew entered speed
If the cost index is set to zero the FMC commands maximum range cruise speed. Cost index modifications are allowed until within ten miles of the top of descent.
Cruise Climb
When VNAV is engaged, resetting the MCP to an altitude higher than the current cruise altitude causes the new altitude to be displayed in the scratchpad of the CDU. The altitude can then be entered on the CRZ ALT line on the CRZ page. When the modification is executed the airplane will climb to the new cruise altitude. The CRZ page displays ACT ECON CRZ CLB.
Step Climb - PEGASUS FMC
Fuel and ETA predictions assume the airplane climbs at each predicted step climb point as airplane weight decreases. FMC predicted step climb increments are based on the step size entered on the CRZ page. Entering a step size of zero causes the FMC to assume a constant altitude cruise. Flight crew entry of a step altitude on the CRZ page overrides the FMC step climb predictions.
Entry of a planned step point and altitude on the RTE LEGS page overrides a "Step To" entry made on the CRZ page.
Predicted or planned step altitudes are displayed on the RTE LEGS page. The distance and ETA to the next step point is displayed on the CRZ and PROGRESS pages. Step points are displayed on the HSI map with a green circle and S/C label.
Step Climb - Non-PEGASUS FMC
Fuel and ETA predictions assume the airplane climbs at each predicted step climb point as airplane weight decreases. FMC predicted step climbs are based on ICAO cruising altitudes or the crew entered STEP TO altitude on the CRZ page. Flight crew entry of a step altitude on the CRZ page overrides the FMC step climb predictions.
Predicted step altitudes are displayed on the RTE LEGS page. The distance and ETA to the next step point are displayed on the CRZ and PROGRESS pages.
Cruise Descent
Resetting the MCP to an altitude below the current cruise altitude causes the new altitude to be copied to the scratchpad if the altitude change is 4000 feet or less. The new cruise altitude can be entered on the cruise page. When the modification is executed the CRZ page displays ACT ECON CRZ DES. If the altitude set in the altitude window is below the speed transition (SPD TRANS) or restriction (SPD RESTR) altitude displayed on the DES page, those altitudes and speeds are deleted and the airplane will maintain cruise speed during the descent.
Note: A cruise descent will not provide speed adjustments to comply with speed restrictions or transition altitude speeds. Transition or speed restrictions must be maintained by flight crew action.
Mode Control Panel Speed Intervention
With VNAV engaged, pushing the IAS MACH selector enables speed intervention. Speed intervention allows the flight crew to change airplane speed with the IAS/MACH selector.
The above illustration shows VNAV mode for each phase of flight during speed intervention.
Note: The FMC does not use the speed set on the MCP for fuel or ETA predictions so FMC predictions are not accurate if speed intervention is used for an extended period.
In VNAV PTH mode, thrust controls speed; in VNAV SPD mode, pitch controls speed.
Non PEGASUS FMC
During a VNAV path descent the FMC will maintain the descent path even if speed intervention is selected. Therefore speed intervention has limited affect when the airplane is on the VNAV descent path.
PEGASUS FMC
In a path descent, VNAV PTH changes to VNAV SPD during speed intervention. In all other phases, the pitch mode remains the same. In VNAV PTH mode, thrust controls speed; in VNAV SPD mode, pitch controls speed.
PEGASUS FMC
In approach phase during speed intervention, pitch mode is in VNAV PTH after speed intervention and the vertical path is kept regardless of IAS MACH selector changes.
VNAV changes to approach phase when:
- Passing the first way point of an FMS approach (ILS, VOR, etc.) or
- The landing runway is the active way point and the direct distance to the runway is 25 nm or less.
If a "Direct To" waypoint on the approach is executed, VNAV transitions to approach phase when the airplane passes the "Direct To" waypoint. If a new waypoint is added to the approach and executed, VNAV may not transition to approach phase.
Descent
The FMC calculates a descent path based on airspeed and altitude constraints and the end of descent (E/D) point. An E/D is created when an altitude constraint is added to a waypoint in the descent phase. The altitude constraint can be entered manually or may be part of a selected VFR or instrument approach procedure. The E/D can be created at one of these positions:
- The Final Approach Fix
- The outer marker (for some ILS approaches)
- The runway threshold for a VFR approach
- The runway threshold for a non-precision approach with a runway waypoint on the RTE LEGS page.
- The missed approach point for a non-precision approach not showing a runway waypoint on the RTE LEGS page.
Entering an arrival procedure provides an E/D point.
The FMC calculates the top of descent (T/D) point after the E/D is entered. T/D is the point where the cruise phase changes to the descent phase. The T/D is displayed on the HSI as a green circle with the label T/D. The descent path starts at the T/D and includes waypoint altitude constraints. The path to the first constraint is based on:
- idle thrust
- speedbrakes retracted
- applicable target speed
- descent wind speed decreasing with decreasing altitude
With the MCP altitude set below the current airplane altitude and at the T/D point, the FMC commands idle thrust for the level deceleration segment and pitch to track the descent path. Usually, the descent speed is economy above 10,000 feet and 240 knots below 10,000 feet. Final deceleration is commanded to arrive at the final approach fix or the outer marker at 170 knots.
If the airplane passes the T/D and the altitude window has not been set lower or if the airplane reaches the MCP altitude in descent, the pitch mode changes to altitude hold. The MCP must be reset and VNAV re-engaged to continue the descent.
Target speeds are changed by entries on the LEGS or DESCENT pages. Forecast descent winds and TAI/ON ALT for approach idle thrust may be entered on the DESCENT FORECAST page.
If an unexpected (not entered on the DESCENT FORECAST page) head wind results in a significant reduction in airspeed to maintain path, thrust increases. The CDU message THRUST REQUIRED displays if the A/T is disconnected and thrust is required to maintain path. The CDU message DRAG REQUIRED displays if an unexpected tail wind results in a significant increase in airspeed. If the airspeed deviation to maintain path is excessive and the limit speed may be exceeded, the FMC directs the airplane to depart the path.
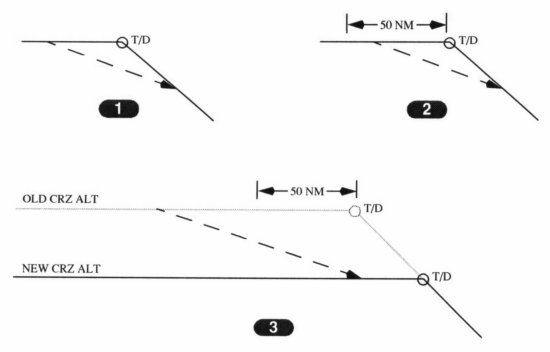
Early Descent
An early descent is initiated by forcing the FMC into the descent phase before reaching the top of descent point. VNAV commands a descent at a reduced descent rate until the idle descent path is intercepted.
|
|
1 |
DES NOW Note: When more than 50 NM from the top of descent point, perform a cruise descent rather than a descend now for descent to intermediate altitudes. During cruise descent the FMC computes a new top of descent for the new cruise altitude and accurate destination fuel predictions. Using DES NOW more than 50 NM from the top of descent point can cause a fuel computation error. |
2 |
Within 50 NM of Top of Descent Point |
3 |
More than 50 NM from Top of Descent Point |
Approach
For VFR and non-precision approaches displaying a runway waypoint on the RTE LEGS page, the FMC calculated path is to a point 50 feet above the runway threshold.
For a non-precision approach without a runway waypoint on the RTE LEGS page, the VNAV path is calculated to the MDA or a calculated altitude at the missed approach point. The calculated altitude may be below the MDA to ensure flight path angle and normal threshold crossing height.
Note: It is the flight crew's responsibility not to descend below the MDA until adequate visual contact is achieved.
Pushing a GA switch activates go-around. The Autothrottle increases thrust and the autopilot pitch maintains airspeed.
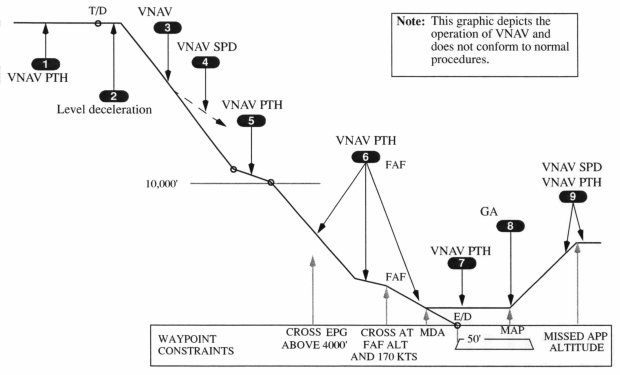
Cruise and Descent Profile (Non-Precision Approach)
|
|
1 |
Cruise |
2 |
Level Descent Phase |
3 |
Descent |
4 |
Speed Limit Protection |
5 |
Speed Restriction Deceleration |
6 |
Descent and Approach |
7 |
Minimum Descent Altitude Non PEGASUS FMC - If the missed approach point is crossed without selecting GA, VNAV will start a VNAV SPD climb to the missed approach altitude. PEGASUS FMC - If the missed approach point is crossed without selecting GA, VNAV will maintain the missed approach point altitude until GA is selected. |
8 |
Go-Around (GA)
|
9 |
Missed Approach Level Off |
VNAV Engine Out Operation
The FMC provides single engine performance guidance which is accessed with the ENG OUT prompt on the CLB or CRZ page. After the engine out page is selected the execute key must be pushed to activate the single engine guidance.
The Autothrottle system does not have a single engine capability and the Autothrottle must be disconnected after an engine failure. VNAV thrust settings and thrust reference modes must be manually set when operating single engine.
Climb (Engine Out Above Engine Out Max Alt)
When the airplane is above the engine out maximum altitude, selection of the ENG OUT> prompt on the VNAV CLB page creates a modification and displays the applicable engine out drift down (D/D) performance data to enable the airplane to descend to the engine out maximum altitude. Execution of the modification activates the engine out drift down function.
Cruise (Engine Out Above Engine Out Max Alt)
Selection of ENG OUT> may also be selected on the CRZ page. If the current altitude is above the engine out maximum altitude, the FMC will command a cruise drift down.
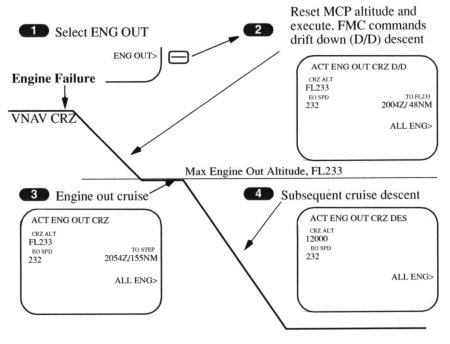
PEGASUS FMC
Selection of ENG OUT> may also be accomplished on the XXXX ALTN page in conjunction with a diversion modification.
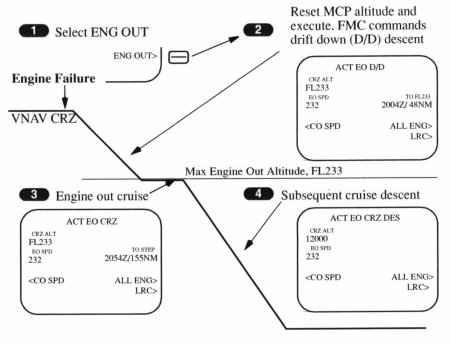
PEGASUS
|
NON-PEGASUS
|
|
1 |
Engine Out Modification Result: The FMC creates a modification and displays the applicable engine out driftdown (D/D) performance data to enable the airplane to descend to the engine out maximum altitude. |
2 |
Drift Down Execution Result: VNAV commands a drift down, and the engine out MAX altitude becomes the cruise altitude at 1L. The descent rate is controlled to maintain at least 300 feet per minute (fpm). Time and distance for the D/D to engine out MAX altitude are displayed at 2R. NON PEGASUS FMC - The FMC sets the drift down speed to the EO (minimum drag) speed. Speed adjustment cannot be made on the FMC. PEGASUS FMC - The initial drift down speed defaults to EO (minimum drag) speed. Prompts for LRC (long range cruise) and CO SPD (company speed) are displayed or a manual speed entry may be made. |
3 |
Engine Out Cruise PEGASUS FMC NON-PEGASUS FMC |
4 |
Subsequent Cruise Descent Result: VNAV cruise descent at approximately 1,250 fpm at the current speed. When the engine out cruise descent intersects the planned descent profile, descent mode becomes active. |